
Happening now…
Dr. Barajas Named 2024 AIAA Huntsville Professional of the Year
Dr. Leandro Barajas, Chief Engineer for the Land Systems Business Area, Defense Systems Sector at Leidos Dynetics was named The 2024 Earl Pearce Professional of the Year (POY) by the American Institute of Aeronautics and Astronautics (AIAA).
[continue reading...]Recent Posts
Leandro on the Web
Disclaimer...
The views expressed by the authors on this website do not necessarily reflect the views of this website, those who link to this website, the author’s mother, father, sister, brother, uncle, aunt, grandparents, cousins, step relations, any other blood relative and the author himself, this website’s web host. Comments on this website are the sole responsibility of their writers and the writer will take full responsibility, liability, and blame for any libel or litigation that results from something written in or as a direct result of something written in a comment. The accuracy, completeness, veracity, honesty, exactitude, factuality and politeness of comments are not guaranteed. Although it may claim otherwise, this website does not offer legal, medical, psychiatric, veterinary, gynecological, archaeological, astronomical, astrological, ontological, paleontological, philosophical, axiological, audiological, bacteriological, mineralogical, criminological, terminological, dermatological, ecclesiastical, campanological, phrenological, phonological, technological, hematological, campanological,... This website may inadvertently link to content that is obscene, prurient, useless, hate-filled, poisonous, pornographic, frivolous, empty, rotten, bad, disgusting, hostile, repulsive, virulent, infectious.This website in no way condones, endorses or takes responsibility for such content.
Featured Articles
 Medasani, Barajas et al., US Patent 9,875,427 Granted
Medasani, Barajas et al., US Patent 9,875,427 Granted
United States Patent 9,875,427 Barajas, et al. July 12, 2016 Method for Object Localization and Pose Estimation for an Object of Interest
 Barajas et al., US Patent 9,387,589 Granted
Barajas et al., US Patent 9,387,589 Granted
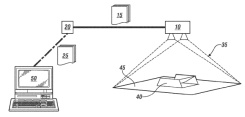
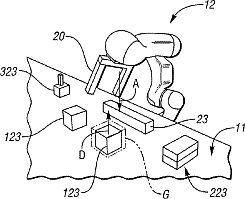
United States Patent 9,387,589 Barajas, et al. July 12, 2016 Visual debugging of robotic tasks
 Sanders, Barajas et al., US Patent 9,120,224 Granted
Sanders, Barajas et al., US Patent 9,120,224 Granted
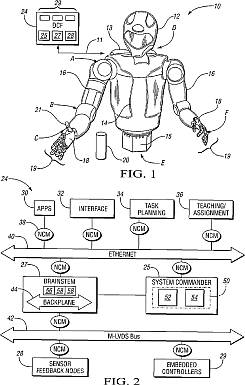
United States Patent 9,120,224 Sanders, Barajas, et al. September 1, 2015 Framework and method for controlling a robotic system using a distributed computer network ...
 Barajas & Sanders, US Patent 8,805,581 Granted
Barajas & Sanders, US Patent 8,805,581 Granted
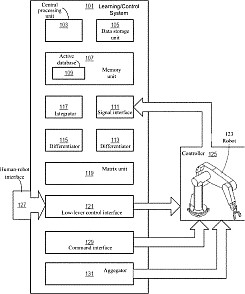
United States Patent 8,805,581 Barajas, et al. August 12, 2014 Procedural memory learning and robot control
 Barajas et al., US Patent 8,577,815 Granted
Barajas et al., US Patent 8,577,815 Granted
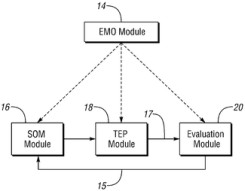
United States Patent 8,577,815 Barajas , et al. November 5, 2013 Method and system for concurrent event forecasting
 Alcazar & Barajas, US Patent 8,515,579 Granted
Alcazar & Barajas, US Patent 8,515,579 Granted
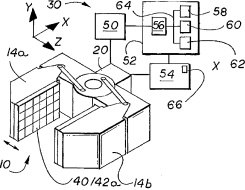
United States Patent 8,515,579 Alcazar, et al. August 20, 2013 Systems and Methods Associated with Handling an Object with a Gripper
 Barajas et al., US Patent 8,369,992 Granted
Barajas et al., US Patent 8,369,992 Granted
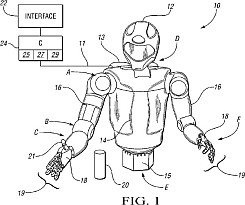
United States Patent 8,369,992 Barajas, et al. February 5, 2013 Embedded diagnostic, prognostic, and health management system and method for a humanoid robot
 High-Resolution Self-Portrait by Curiosity Rover Arm Camera
High-Resolution Self-Portrait by Curiosity Rover Arm Camera
On Sol 84 (Oct. 31, 2012), NASA's Curiosity rover used the Mars Hand Lens Imager (MAHLI) to capture this set ...
 Dr. Barajas will be the opening Keynote Speaker at the IEEE Workshop on Engineering Applications (WEA) in Bogotá, Colombia
Dr. Barajas will be the opening Keynote Speaker at the IEEE Workshop on Engineering Applications (WEA) in Bogotá, Colombia
Talks Titles: - NASA-GM Robonaut 2: An Engineering Revolution in Robotics and Automation - Mars Desert Research Station: Engineering Challenges in Self-Sufficiency ...
Dear IEEE Huntsville Section Members, We are very excited to let you know about the creation of an IEEE Joint Robotics ...
Awards & Honors
 Dr. Barajas Inducted into the 2020 Class of Leidos Technical Fellows
Dr. Barajas Inducted into the 2020 Class of Leidos Technical Fellows Dr. Barajas has been selected as a 2020 Leidos Technical Fellow in Robotics, Autonomy and Instrumentation. Currently, less than 73 (0.2%) out of the almost 40,000 Leidos employees are bestowed with this distinction.
 Dr. Barajas receives the 2019 IEEE Huntsville Professional of the Year Award
Dr. Barajas receives the 2019 IEEE Huntsville Professional of the Year Award Dr. Barajas received the 2019 IEEE Huntsville Section Professional of the Year Award for significant works and accomplishments towards the advancement of the IEEE Huntsville Section.
 Dr. Barajas Granted with 20th U.S. Patent
Dr. Barajas Granted with 20th U.S. Patent Dr. Barajas has authored over 40 patents and patent applications, 7 Defensive Publications, and 9 Trade Secrets. Leandro’s U.S. Patents granted to date include: 7,171,897, 7,292,960, 7,324,924, 7,526,461, 7,558,771, 7,672,811, 7,761,389, 7,771,089, 7,899,761, 7,996,113, 7,999,664, 8,369,992, 8,515,579, 8,577,815, 8,805,581, 8,843,236, 9,120,224, 9,221,170, 9,387,589, and 9,875,427.
 Dr. Barajas selected as 2016 AIAA Associate Fellow
Dr. Barajas selected as 2016 AIAA Associate Fellow The American Institute of Aeronautics and Astronautics (AIAA) is pleased to announce its Class of 2016 Associate Fellows. AIAA formally honored and inducted the class at its AIAA Associate Fellows Recognition Ceremony and Dinner on Monday, January 4, 2016, at the Manchester Grand Hyatt, San Diego, California, in conjunction with the AIAA Science and Technology Forum […]
 Dr. Barajas Receives NASA’s Space Act Award
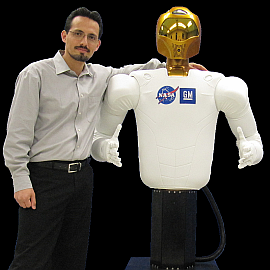
Dr. Barajas Receives NASA’s Space Act Award This recognition was granted for the development of a significant scientific or technical contribution, Robonaut 2 (R2) MSC-CC-001, that has been determined to be of value in the conduct of an aeronautical or space activity of NASA.
 NASA’s Robonaut 2 Lauded as 2014 Government Invention of the Year
NASA’s Robonaut 2 Lauded as 2014 Government Invention of the Year Robonaut 2, NASA’s first humanoid robot in space, was selected as the NASA Government Invention of the Year for 2014. Many outstanding inventions were considered for this award, and Robonaut 2 was chosen after a challenging review by the NASA selection committee that evaluated the robot in the following areas: Aerospace Significance, Industry Significance, Humanitarian […]
Patents
Yuan, Barajas et al., US Patent 7,996,113 GrantedUnited States Patent 7,996,113 Yuan, Barajas, et al. August 9, 2011 Methods of integrating real and virtual world using virtual sensor/actuator.
Xiao, Barajas, et al. US Patent 7,672,811 GrantedUnited States Patent 7,672,811 Xiao, Barajas, et al. March 2, 2010 System and method for production system performance prediction.
Srinivasa & Barajas, US Patent 7,526,461 GrantedUnited States Patent 7,526,461 Srinivasa & Barajas April 28, 2009 System and method for temporal data mining.
Barajas, et al. US Patent 7,171,897 GrantedSystem and methods for data-driven control of manufacturing processes Abstract: Systems and methods for implementing hybrid, closed-loop control that generates control values for processes defined by a limited number of function evaluations and large amounts of process and measurement noise. The described control system is applied to a stencil printing process for applying solder paste to […]
Papers
3D Visual Perception System for Bin Picking in Automotive Sub-Assembly AutomationS. Lee, J. Kim, M. Lee, K. Yoo, L. G. Barajas, and R. Menassa, “3D Visual Perception System for Bin Picking in Automotive Sub-Assembly Automation,” International Conference on Robotics & Automation (ICRA 2012), Saint Paul, MN, 2012.
Estimating Object Grasp Sliding via Pressure Array SensingJ. A. Alcazar and L. G. Barajas, “Estimating Object Grasp Sliding via Pressure Array Sensing,” submitted to the International Conference on Robotics & Automation (ICRA 2012) Saint Paul, MN, 2012.
Local Recurrence Based Performance Prediction and Prognostics in the Nonlinear and Nonstationary SystemsH. Yang, S. T. S. Bukkapatnam, L. G. Barajas, “Local Recurrence Based Performance Prediction and Prognostics in the Nonlinear and Nonstationary Systems,” Pattern Recognition, vol. 44, pp. 1834-1840, 2011
Dexterous Robotic Hand Grasping Method for Automotive PartsJ. A. Alcazar and L. G. Barajas, “Dexterous Robotic Hand Grasping Method for Automotive Parts,” presented at the IEEE-RAS International Conference on Humanoid Robots, Nashville, TN, December 6, 2010
Virtual Launch & Validation of Manufacturing Automation ControlsL. G. Barajas, S. R. Biller, F. Gu, and C. Yuan, “Virtual Launch & Validation of Manufacturing Automation Controls,” presented at the 6th IEEE Conference on Automation Science and Engineering (CASE). Toronto, Canada, 2010
A Survey on Prognostic MetricsT.-C. Lu, N. Srinivasa, and L. G. Barajas, “A Survey on Prognostic Metrics,” presented at the Machinery Failure Prevention Technology (MFPT) Conference, Huntsville, AL, 2010
Mars Desert Research Station
 Mars Desert Research Station – Crew 109 Summary Report
Mars Desert Research Station – Crew 109 Summary Report The MDRS rotation for our Crew (CIX) has come to an end, and it is time for all to move on and to look for other planets! The table below summarizes the Extra-Vehicular Activities (EVA) performed during the 2 week stay over the 2011 Christmas period (Dec 17-Dec 31). And yes, we had almost 54 […]
 Facebook Profile
Facebook Profile Google Scholar
Google Scholar LeandroBarajas.com
LeandroBarajas.com Linked in Profile
Linked in Profile Math Genealogy Project
Math Genealogy Project Matlab Profile
Matlab Profile My US Patents Issued
My US Patents Issued ORCID Profile
ORCID Profile ResearchGate Profile
ResearchGate Profile Scopus Profile
Scopus Profile