Medasani, Barajas et al., US Patent 9,875,427 Granted
Feb 9th, 2018 | By Leandro | Category: Featured Articles, NASA, Patents, Publications, Robonaut 2| United States Patent | 9,875,427 |
| Barajas, et al. | July 12, 2016 |
Method for Object Localization and Pose Estimation for an Object of Interest
| Download: US Patent 9,875,427 | [text] |
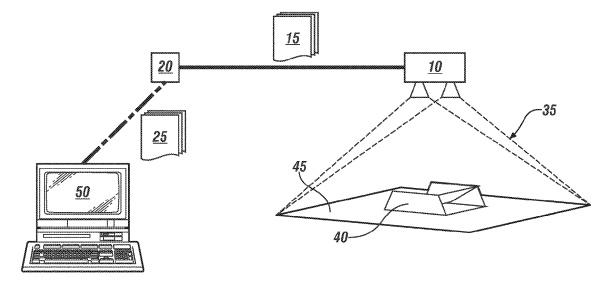
A method for localizing and estimating a pose of a known object in a field of view of a vision system, the known object including a structural entity having pre-defined features including spatial dimensions, the method comprising: developing a processor-based model of the known object; capturing a bitmap image file including an image of the field of view including the known object; extracting features from the bitmap image file; matching the extracted features with features associated with the model of the known object; localizing an object in the bitmap image file based upon the extracted features, including identifying features in the bitmap image file associated with features of the known object, wherein identifying the features includes fitting a digital window around a region of interest in the bitmap image file and identifying features only in a portion of the bitmap image file within the digital window, and wherein fitting the digital window includes identifying inliers in the bitmap image file including data whose distribution can be explained by some set of model parameters associated with the known object; clustering the extracted features of the localized object; merging the clustered extracted features; detecting the known object in the field of view based upon a comparison of the merged clustered extracted features and the processor-based model of the known object; and estimating a pose of the detected known object in the field of view based upon the detecting of the known object.
 Facebook Profile
Facebook Profile Google Scholar
Google Scholar LeandroBarajas.com
LeandroBarajas.com Linked in Profile
Linked in Profile Math Genealogy Project
Math Genealogy Project Matlab Profile
Matlab Profile My US Patents Issued
My US Patents Issued ORCID Profile
ORCID Profile ResearchGate Profile
ResearchGate Profile Scopus Profile
Scopus Profile