Sanders, Barajas et al., US Patent 9,120,224 Granted
Sep 11th, 2015 | By Leandro | Category: Featured Articles, NASA, Patents, Publications, Robonaut 2| United States Patent | 9,120,224 |
| Sanders, Barajas, et al. | September 1, 2015 |
Framework and method for controlling a robotic system using a distributed computer network
| Download: pat9120224.pdf | [text] |
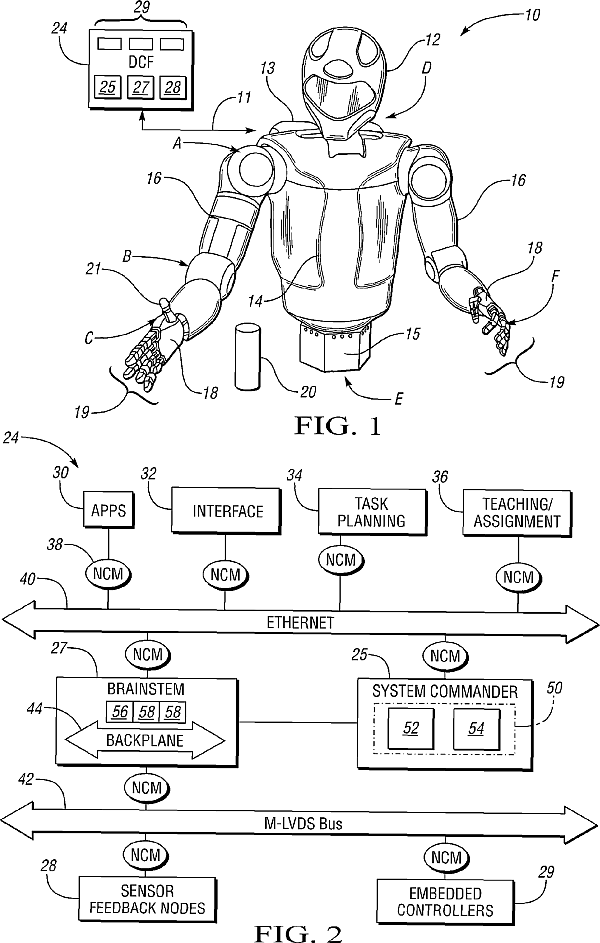
A robotic system operable for performing an autonomous task, the robotic system comprising: a humanoid robot having a plurality of integrated system components, including a plurality of compliant robotic joints, actuators adapted for moving the robotic joints, and sensors adapted for measuring feedback data of the integrated system components including the plurality of joints; and a multi-level distributed control framework (DCF) adapted for controlling the integrated system components over multiple high-speed communication networks, including a backplane, the DCF including: a plurality of first controllers each configured as a joint controller operable for processing the measured feedback data within a corresponding one of the integrated system components, such that each of the first controllers controls a single degree of freedom (DOF) of the robot, wherein each of the plurality of joint controllers is embedded in the humanoid robot in close proximity to a respective one of the robotic joints; a second controller in the form of a brainstem having a plurality of modules connected to the backplane, wherein the brainstem, via the modules, provides reactive commands to the first controllers to command performance of the autonomous task in response to top-level commands, and prioritizes actions of the robot for the autonomous task by assigning a required communications speed to each of the actions and a third controller in the form of a system commander that is adapted for transmitting the top-level commands to the second controller as a signal, thereby commanding performance of the autonomous task; wherein the DCF centralizes and abstracts control data to, and the feedback data from, the integrated system components in a single logical location such that access to the centralized control data is provided only via the system commander to facilitate control of the humanoid robot across the multiple high-speed communication networks.
 Facebook Profile
Facebook Profile Google Scholar
Google Scholar LeandroBarajas.com
LeandroBarajas.com Linked in Profile
Linked in Profile Math Genealogy Project
Math Genealogy Project Matlab Profile
Matlab Profile My US Patents Issued
My US Patents Issued ORCID Profile
ORCID Profile ResearchGate Profile
ResearchGate Profile Scopus Profile
Scopus Profile