Barajas & Sanders, US Patent 8,805,581 Granted
Aug 25th, 2014 | By Leandro | Category: Featured Articles, NASA, Patents, Publications, Robonaut 2| United States Patent | 8,805,581 |
| Barajas, et al. | August 12, 2014 |
Procedural memory learning and robot control
| Download: 08805581.pdf | [text] |
Abstract
Methods and apparatus for procedural memory learning to control a robot by demonstrating a task action to the robot and having the robot learn the action according to a similarity matrix of correlated values, attributes, and parameters obtained from the robot as the robot performs the demonstrated action. Learning is done by an artificial neural network associated with the robot controller, so that the robot learns to perform the task associated with the similarity matrix. Extended similarity matrices can contain integrated and differentiated values of variables. Procedural memory learning reduces overhead in instructing robots to perform tasks. Continued learning improves performance and provides automatic compensation for changes in robot condition and environmental factors.
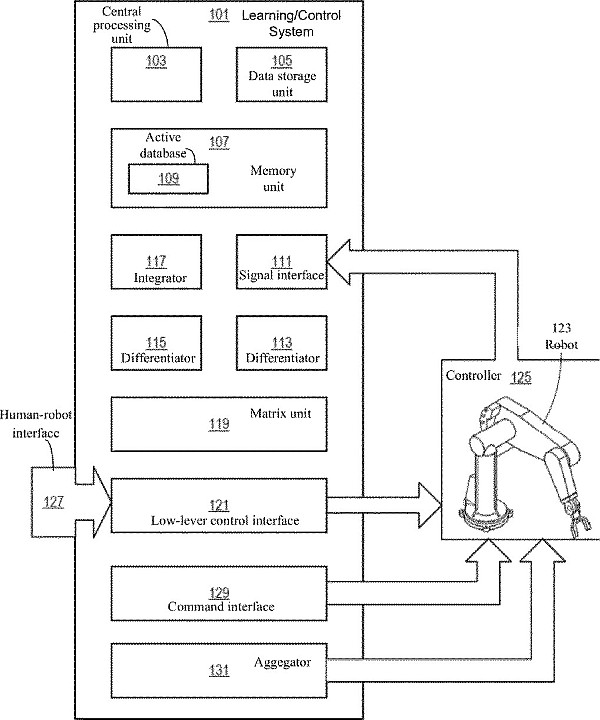
A method for procedural memory learning to control a robot to perform a task, the method comprising: using a control system to: compute a similarity matrix whose elements comprise values according to at least one function of similarity of a plurality of signals from the robot, the signals related to an action of the task performed by the robot with direct control command via a low-level interface; input into an artificial neural network (ANN) controller of the robot: the direct control command; and the similarity matrix; receive control signals from the ANN controller to control the robot; aggregate the control signals from the ANN controller by an aggregator according to a kinematics model of the robot; and send aggregated control signals from the aggregator to the robot, to perform the task.
 Facebook Profile
Facebook Profile Google Scholar
Google Scholar LeandroBarajas.com
LeandroBarajas.com Linked in Profile
Linked in Profile Math Genealogy Project
Math Genealogy Project Matlab Profile
Matlab Profile My US Patents Issued
My US Patents Issued ORCID Profile
ORCID Profile ResearchGate Profile
ResearchGate Profile Scopus Profile
Scopus Profile