Alcazar & Barajas, US Patent 8,515,579 Granted
Sep 1st, 2013 | By Leandro | Category: Featured Articles, NASA, Patents, Publications, Robonaut 2
| United States Patent |
8,515,579 |
| Alcazar, et al. |
August 20, 2013 |
AbstractA system associated with handling an object with a gripper includes a sensor that is configured to measure spatially distributed data that represents the position of the object that is handled by the gripper. The system further includes a computing unit that is configured to determine the behavior of the object.
| Inventors: |
Alcazar; Javier A (Royal Oak, MI), Barajas; Leandro G. (Troy, MI) |
| Applicant: |
| Name |
City |
State |
Country |
Type |
Alcazar; Javier A
Barajas; Leandro G. |
Royal Oak
Troy |
MI
MI |
US
US |
|
|
| Assignee: |
GM Global Technology Operations LLC (Detroit, MI) |
| Family ID: |
44082799 |
| Appl. No.: |
12/634,313 |
| Filed: |
December 9, 2009 |
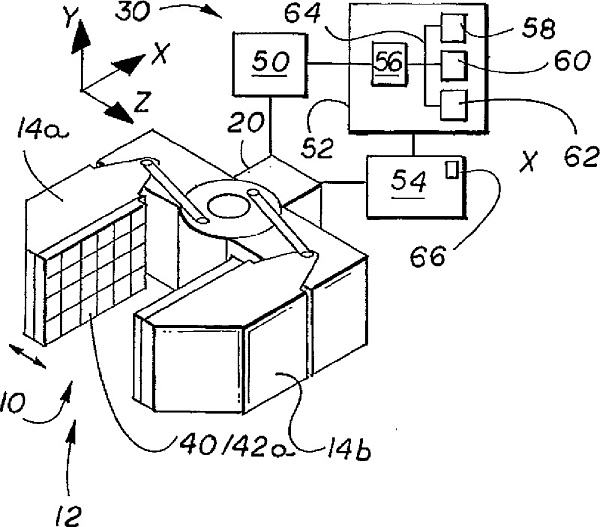
A method associated with handling an object using a gripper, comprising: determining, by a computing unit using a processor, a vector field as a function of change in spatially-distributed data over time, the spatially-distributed data being measured at different positions on the object or on a gripping surface of the gripper by a sensor; and determining, by the computing unit, a behavior of the object as a function of the vector field, the behavior of the object comprising at least one vector selected from a group consisting of: a translational vector, wherein the translational vector is a resultant vector of the vector field; and a rotational vector, wherein the rotational vector is a curl of the vector field.
 Facebook Profile
Facebook Profile Google Scholar
Google Scholar LeandroBarajas.com
LeandroBarajas.com Linked in Profile
Linked in Profile Math Genealogy Project
Math Genealogy Project Matlab Profile
Matlab Profile My US Patents Issued
My US Patents Issued ORCID Profile
ORCID Profile ResearchGate Profile
ResearchGate Profile Scopus Profile
Scopus Profile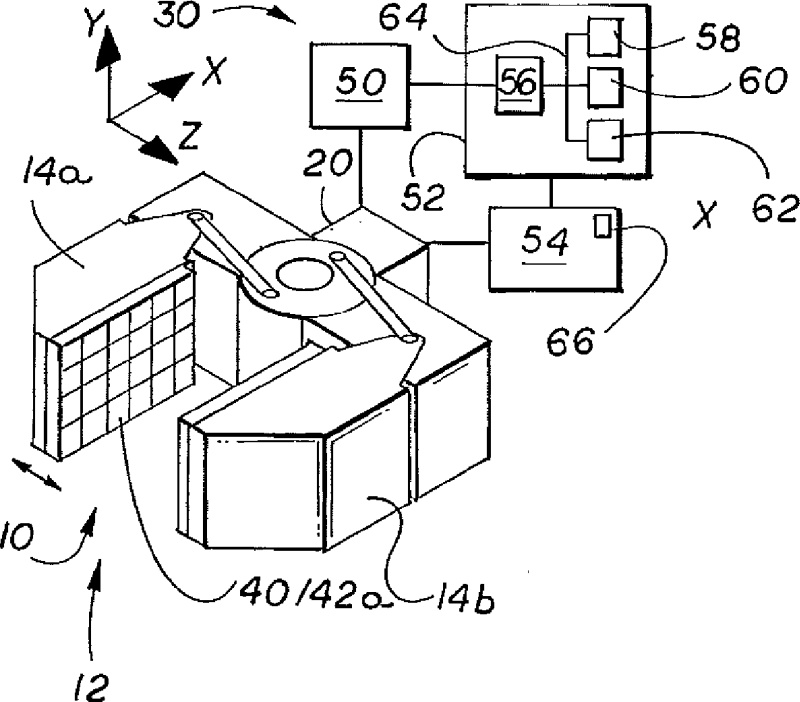{kind=link}