Barajas et al., US Patent 8,369,992 Granted
Feb 5th, 2013 | By Leandro | Category: Featured Articles, NASA, Patents, Publications, Robonaut 2, Uncategorized| United States Patent | 8,369,992 |
| Barajas, et al. | February 5, 2013 |
Embedded diagnostic, prognostic, and health management system and method for a humanoid robot
AbstractA robotic system includes a humanoid robot with multiple compliant joints, each moveable using one or more of the actuators, and having sensors for measuring control and feedback data. A distributed controller controls the joints and other integrated system components over multiple high-speed communication networks. Diagnostic, prognostic, and health management (DPHM) modules are embedded within the robot at the various control levels. Each DPHM module measures, controls, and records DPHM data for the respective control level/connected device in a location that is accessible over the networks or via an external device. A method of controlling the robot includes embedding a plurality of the DPHM modules within multiple control levels of the distributed controller, using the DPHM modules to measure DPHM data within each of the control levels, and recording the DPHM data in a location that is accessible over at least one of the high-speed communication networks.
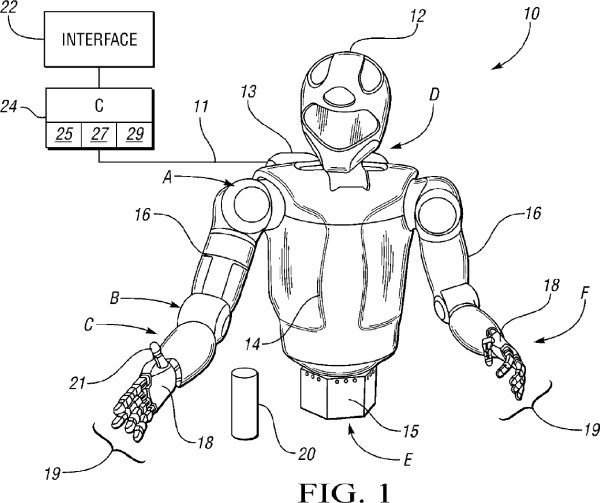
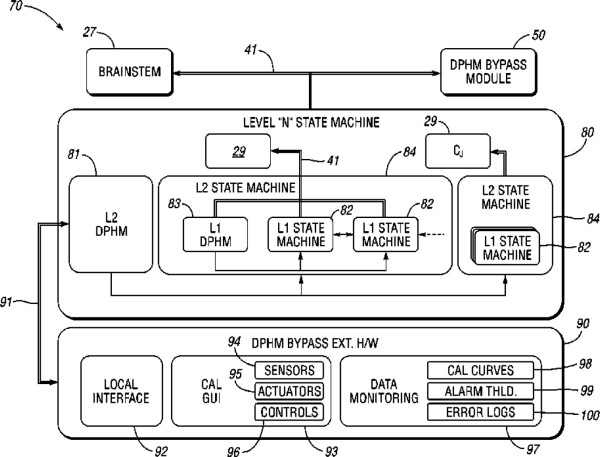
A robotic system comprising: a robot having a plurality of integrated system components, including a plurality of compliant robotic joints, actuators each connected to and configured to move a respective one of the robotic joints, and sensors that measure control and feedback data at a plurality of control points of the robotic system; and a controller in communication with the integrated system components, and having distributed control levels, wherein the controller is configured to control the integrated system components using information from the sensors, via the multiple distributed control levels, over multiple high-speed communication networks; wherein the controller includes a finite state machine (FSM) having hardware, software, and firmware, and further includes a plurality of embedded diagnostic, prognostic, and health management (DPHM) modules, at least one of which is embedded within each of the integrated system components, each of the DPHM modules being configured to measure and control, using the at least one FSM, DPHM data and system behavior for a respective one of the integrated system components, and to record the DPHM data in a memory location that is accessible over the high-speed communication networks.
 Facebook Profile
Facebook Profile Google Scholar
Google Scholar LeandroBarajas.com
LeandroBarajas.com Linked in Profile
Linked in Profile Math Genealogy Project
Math Genealogy Project Matlab Profile
Matlab Profile My US Patents Issued
My US Patents Issued ORCID Profile
ORCID Profile ResearchGate Profile
ResearchGate Profile Scopus Profile
Scopus Profile